How it works
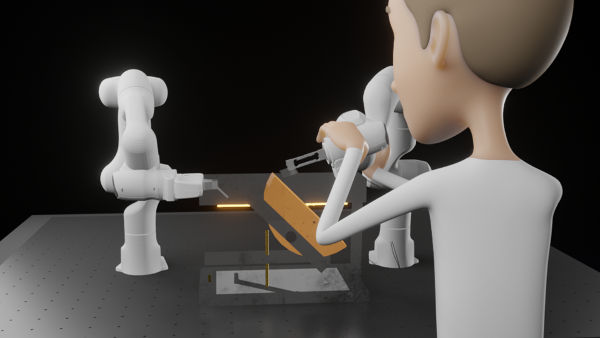

It took the know-how of the cheese Master Eddy Baillifard, founder of Raclett'House, and the expertise of the Robot Learning & Interaction group from the Idiap Research Institute to achieve the first raclette made by a robot. Beyond the technical challenge, the project shows the potential of learning from demonstration techniques and human-robot collaboration.
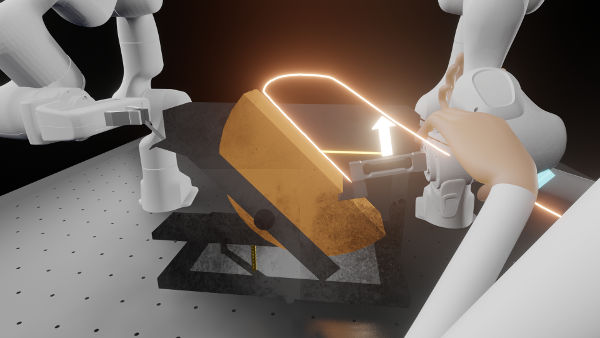
The cheese master hand is quick and smooth: he applies a precisely controlled pressure on the melting cheese surface to let it land on the plate. Et voilà, the famous Swiss raclette! The gesture seems easy, but the know-how behind it is crucial. Every raclette enthusiast can testify how hard it is to master this apparently simple skill. “Depending on the type of raclette cheese, the surface can vary in terms of softness and can be more or less fluid,” says Eddy Baillifard, the Master and ambassador of the raclette cheese. Mimicking this skill with a robot isn't easy. To achieve this, Emmanuel Pignat, a PhD from the Idiap's robotic group used a novel approach: Eddy guided the robot's arm to let it record the movements and forces needed to perform the task. This learning technique allows to transfer skills from the human to the robot in an intuitive manner. The range of applications is wide, including industrial robots, service robots, and assistive robots. It relieves professionals of their most repetitive, dangerous or uncomfortable duties, in order to spend more time using their human skills, such as supervision, evaluation or decision making.
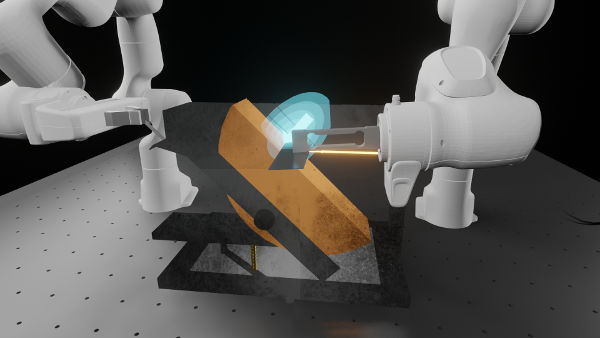
If learning from demonstration – the scientific term for copying a gesture – seems an obvious task to us humans, the challenge is much harder for robots. They are usually programmed for a specific task, which is repeated accurately in a loop. “Thanks to artificial intelligence algorithms, the robotic arm can generate movements that can adapt to new situations. In this specific case, the cheese can be in slightly different positions and orientations, and there can be more or less cheese left in the oven,” says Sylvain Calinon, head of Idiap's Robot learning & interaction group. “This ability to adapt is the key to allow efficient human-robot collaboration. The cheese Master shows each time a slightly different way to scrape the raclette cheese onto the plate. The underlying learning algorithms allows the robot to integrate these nuances to recreate a meaningful gesture in a new situation.”
This collaboration between the cheese Master and the researchers was supported by the whole Canton of Valais. The local authorities brought their financial support to this scientific research. The TTM company created a specific oven with a handle for the robot to grab the plate with the cheese. Nicolas Fontaine, a young local entrepreneur, facilitated the contacts between TTM, Raclett'House and Valais/Wallis Promotion which made the film. “When we were asked, we immediately decided to help. This project highlights our strong belief about Valais: it's a unique territory mixing tradition and innovation. Both are represented by the best people and skills as illustrated in this short film,” says Alessandro Marcolin, marketing director of Valais/Wallis Promotion.
Roboclette description on Valais.ch website (in various languages): in English, en français, auf Deutsch.
The Robot Learning & Interaction group at the Idiap Research Institute develops approaches for human-robot collaboration and robot programming from demonstration.
The goal is to transfer new skills to robots in an intuitive manner, by conceiving user-friendly interfaces and algorithms to let a robot learn new skills by imitation, instead of having to reprogram the robot through a computer language.

Behind these approaches, the developed mathematical models have different objectives (recognition, prediction, synthesis), and are shared by multiple learning modalities (imitation and exploration).
Pignat, E. and Calinon, S. (2019). Bayesian Gaussian Mixture Model for Robotic Policy Imitation. IEEE Robotics and Automation Letters (RA-L), 4:4, 4452-4458.
Emmanuel Pignat
Creator
(PhD Student in the Robot Learning & Interaction group at Idiap)
Sylvain Calinon
Scientific Coordinator
(Senior Researcher, Head of the Robot Learning & Interaction group at Idiap)
Email: sylvain.calinon@idiap.ch